Learning With a Goal
A unified perspective of Bayesian optimization and active learning
Traditionally, Bayesian optimization (BO) has been perceived as a technique for optimizing expensive objective functions through efficient data sampling, while active learning (AL) is often seen as a way to selectively query data to improve model performance. Recently, Fiore et al. (2024)
Goal-driven learning
Goal-driven learning
BO and AL can be regarded as goal-driven procedures, where a surrogate model is built to capture the behavior of a system or effectively inform an optimization procedure to minimize the given objective. This goal-driven process seeks to determine the “best” location of the domain to acquire information about the system, and refine the surrogate model towards the goal. Mathematically, it can be formulated as:
\[x^* = \arg \min_{x \in \mathcal{X}} f(R(x))\]where \(f\) is the objective and \(R(x)\) is the response of the system. Here, \(f\) may represent the error between the surrogate approximation and the response, such that the goal is to minimize the error to improve the accuracy of the surrogate. Alternatively, \(f\) may also represents a performance indicator based on the response, so the goal is to minimize this indicator to improve the system’s performance.
Adaptive sampling
BO and AL use adaptive sampling schemes to efficiently accomplish a given goal while adapting to the previously collected information:
- In BO, the goal is to minimize the objective function by iteratively selecting the next location to sample based on the surrogate model. The surrogate model is updated after each sample to refine the approximation and guide the next decision.
- In AL, the goal is to minimize the generalization error of a model by iteratively selecting the next sample to improve the model’s performance. The model is updated after each sample to refine the approximation and guide the next decision.
We can further classify adaptive sampling schemes into three main categories:
| Category | Description |
|---|---|
| Adaptive Probing | Methods that do not rely on a surrogate model and directly probe the system to gather information in a sequential manner. |
| Adaptive Modeling | Methods that compute a surrogate model independently, without using it to inform the sampling process. |
| Adaptive Learning | Methods that use information from the surrogate model to make decisions and update the model based on those decisions. |
The key distinction between these categories lies in the concept of goal-driven learning, which is the distinctive element of the adaptive learning class. In this paradigm, the learner actively gathers information from the surrogate model to guide its decisions towards the desired goal, and the surrogate model is consequently improved by the outcome of these decisions.
In contrast, the adaptive probing and adaptive modeling classes do not exhibit this goal-driven learning characteristic. Adaptive probing methods operate without the aid of a surrogate, while adaptive modeling approaches compute a surrogate that is not directly used to inform the sampling process.
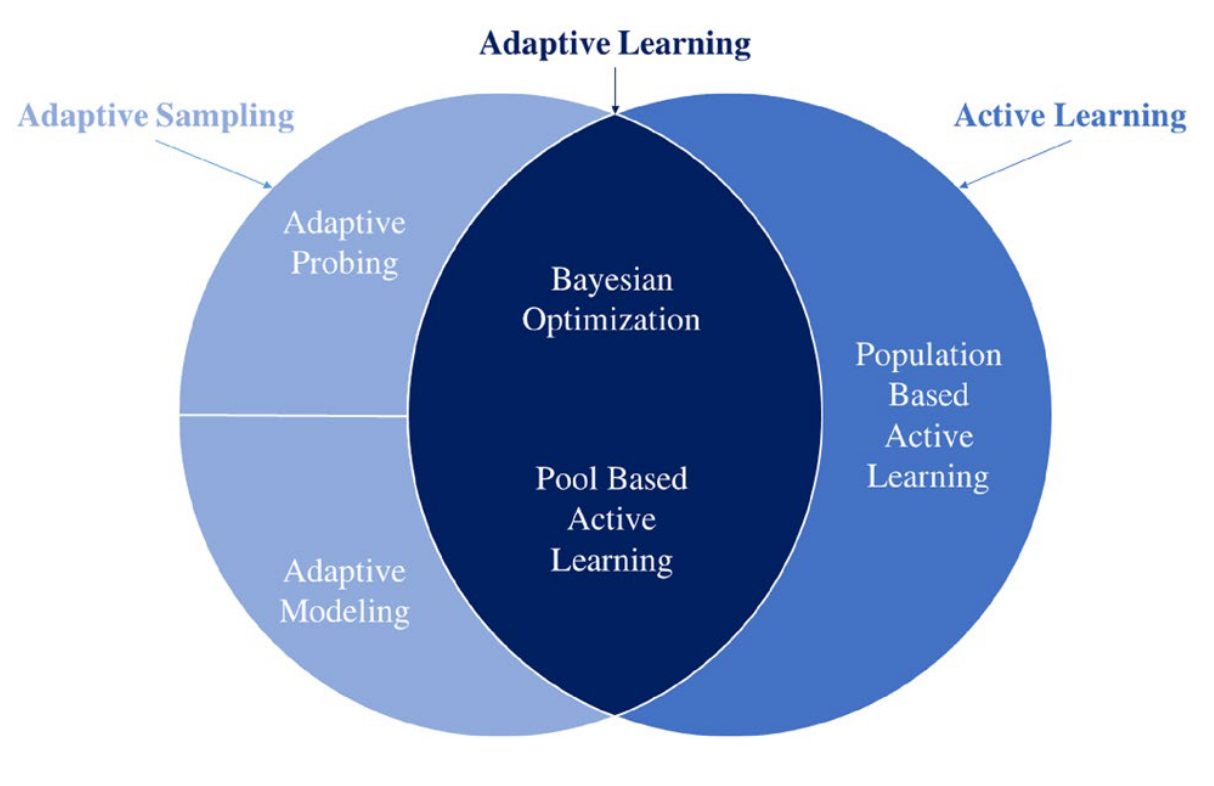
Figure 1. Classification of adaptive sampling techniques: Where adaptive sampling and active learning meet.
Learning and infill criteria
The strong synergy between AL and BO is rooted in the substantial analogy between the learning criteria that drive the AL procedure and the infill criteria that characterize the BO scheme.
Learning criteria
Learning criteria establish a metric for quantifying the gains of all the possible learner decisions, and prescribe an optimal decision based in information acquired from the surrogate model. In AL, there are 3 essential learning criteria
- Informativeness: The sampling policy is driven by the goal of acquiring the most informative samples, i.e., the ones that are expected to contribute the maximum information.
- Representativeness: The sampling policy aims to select samples that are representative of the target domain, exploiting the structure of the problem to direct queries to locations
- Diversity: The sampling policy seeks to select samples that are diverse, i.e., well-spread across the domain, preventing the concentration of queries in small local regions.
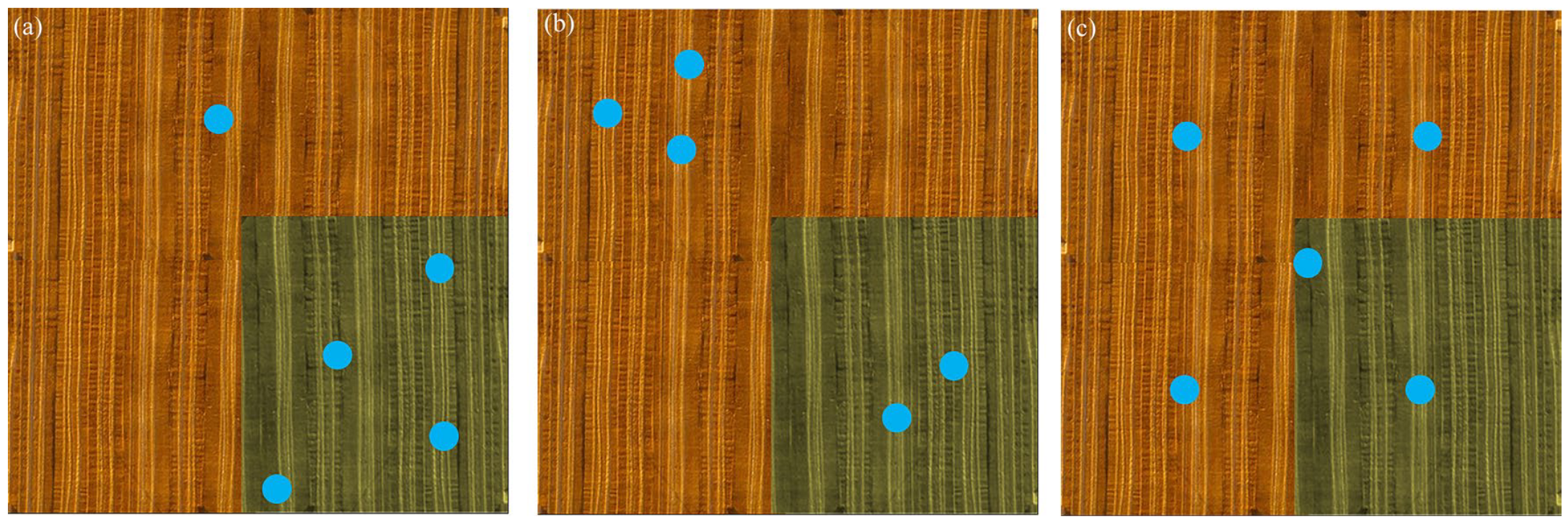
Figure 2. Illustration of the three learning criteria in watering optimization problem: (a) informativeness, (b) representativeness, and (c) diversity.
Infill criteria
On the other hand, the infill criteria in BO provides a measure of the information gain that would result from sampling at a particular location. The most common infill criteria are
- Global exploration: This criterion focuses on choosing samples in regions of high predictive uncertainty, enhancing global awareness of the search space. However, this approach may not direct resources optimally towards the specific goal.
- Local exploitation: This criterion prioritizes choosing samples in regions with high predictive mean, focusing the search on promising areas. Yet, it may result in less accurate knowledge of the overall objective function distribution.
Takeaways
BO and AL have traditionally been viewed as distinct fields with separate goals and methodologies. However, this paper provides a unified perspective that highlights the shared principles underlying both fields. By recognizing the synergy between BO and AL, we can leverage the strengths of each field to develop more powerful and efficient learning algorithms.
Citation
If you find this post useful, please cite it as:
Or in BibTeX format:
@article{suwandi2024learnwithagoal,
title = "Learning With a Goal",
author = "Suwandi, Richard Cornelius",
journal = "Posterior Update",
year = "2024",
month = "Sep",
url = "https://richardcsuwandi.github.io/blog/2024/learn-with-a-goal/"
}